Orion CEV approaching the Moon. Copyright 2006 by Aviation Week and Space Technology,
all rights reserved. Fair use for educational purposes.
Workshop co-organizer Rich Volpe has created the Web page Space Robotics Workshop to document the event and to include soft copy of the presentation packages. See the lower part of this page also for some photographs of the event.
This workshop on robots in space includes both planetary robotics and orbital robotics. Our theme is:
Robots can help astronauts in (orbital) space by reducing astronaut extra-vehicular activity (EVA) time by performing tasks that otherwise would be performed by astronauts, and by assisting astronauts during EVA. Associated topics include human-robot interfaces, robot-robot cooperation, zero-gravity locomotion, and robotic inspection and repair of space vehicles.
As space exploration mission durations increase, the need to reduce astronaut workload increases. Inspection, maintenance, and repair in space become more important for long duration space travel, such as for missions to the Moon and Mars. This workshop will illuminate issues and potential solutions to the unique problems of robots in the zero-gravity, vacuum, and radiation environment of space.
January 15, 2007: Final lecture materials due to TC.
January 31, 2007: Lecture materials due from TC to ICRA '07 for printing.
April 14, 2007: Workshop in Rome.
Sala Chiostro
School of Engineering
University of Roma "La Sapienza"
Via Eudossiana, 18
| Number | Presenter | Organization | Topic | Duration | Start | End |
| 1 | Richard Volpe | NASA JPL | Introduction to the Planetary Rovers Session | 0:15 | 8:30 | 8:45 |
| 2 | Rick Wagner | Northrop Grumman | Introduction to the Orbital Robotics Session | 0:15 | 8:45 | 9:00 |
| Planetary Rovers | ||||||
| 3 | Mark W. Maimone, P. Chris Leger, and Jeffrey J. Biesiadecki | NASA JPL | Overview of the Mars Exploration Rovers' Autonomous Mobility and Vision Capabilities | 0:25 | 9:00 | 9:25 |
| 4 | Brian Wilcox | NASA JPL | ATHLETE: A Landing, Mobility, and Manipulation System for the Moon | 0:25 | 9:25 | 9:50 |
| 5 | Pietro Baglioni | ESA | The Rover Concept for the ESA ExoMars Mission (in package, not presented) | 0:0 | 9:50 | 9:50 |
| 6 | Simon Lacroix and Thierry Peynot | LAAS-CNRS | Selection and Monitoring of Rover Navigation Modes: A Probabilistic Diagnosis Approach | 0:30 | 9:50 | 10:20 |
| 7 | Roland Siegwart | Swiss Federal Institute of Technology in Zurich | Evaluation and Optimization of Locomotion Performance of Rovers | 0:30 | 10:20 | 10:50 |
| 8 | Kazuya Yoshida and Keiji Nagatani | Tohoku University | Terramechanics Based Analysis and Motion Control of Rovers on Simulated Lunar Soil | 0:30 | 10:50 | 11:20 |
| 9 | Dimi Apostolopoulos | Carnegie Mellon University, Robotics Institute | SILVRCLAW: Stowable, Inflatable, Vectran, Rigidizable, Cold-resistant, Lightweight, All-terrain Wheel: Research and Development | 0:30 | 11:20 | 11:50 |
| 10 | Matt Maniscalco, Nicolas Lee, Nathan Salowitz, Forrest Hetherington, Elizabeth Grote, Shandor Dektor, and Robert Twiggs | Stanford University | A Design Concept for a Robotic Lunar Regolith Harvesting System | 0:30 | 11:50 | 12:20 |
| 16 | Frank Kirchner | Universit�t Bremen | AI-based Space Robotics: Reconfigurable Robot Teams for Exploration | 0:25 | 12:20 | 12:45 |
| Lunch | 1:30 | 12:45 | 14:15 | |||
| Orbital Robotics | ||||||
| 11 | All | All | Rover Discussion | 0:30 | 14:15 | 14:45 |
| 12 | Paul Schenker | NASA JPL | Perspectives on Robots in Space (in package, not presented) | 0:0 | 14:45 | 14:45 |
| 13 | Rick Wagner and Hobson Lane | Northrop Grumman | Lessons Learned on the AWIMR Project | 0:30 | 14:45 | 15:15 |
| 14 | William Singhose and Khalid Sorensen | Georgia Tech | Manipulation of Flexible Space Structures: Effects of Command Shaping and Human Interfaces | 0:30 | 15:15 | 15:45 |
| 15 | Brian Fast | ISS Lab, Cleveland State University | A Form Based Control Algorithm for Reducing the Complexity of an Attitude Control System | 0:30 | 15:45 | 16:15 |
| 17 | Steven Dubowsky and Peggy Boning | The Mechanical Engineering Field and Space Robotics Laboratory, MIT | The Coordinated Control of Space Robot Teams for the On-Orbit Construction of Large Flexible Space Structures | 0:30 | 16:15 | 16:45 |
| 18 | Hiroshi Ueno and Yasufumi Wakabayashi | JAXA | Force Fighting Analysis between Space Manipulator and Berthing Mechanism during On-orbit Assembly Operation | 0:25 | 16:45 | 17:10 |
| 19 | Marcello Romano | Naval Postgraduate School | Laboratory Experimental Validation of Autonomous Spacecraft Proximity Maneuvers | 0:25 | 17:10 | 17:35 |
| 20 | All | All | Orbital Robotics Discussion | 0:25 | 17:35 | 18:00 |
Rick Wagner,
Corresponding Chairman
RAS Space Robotics TC.
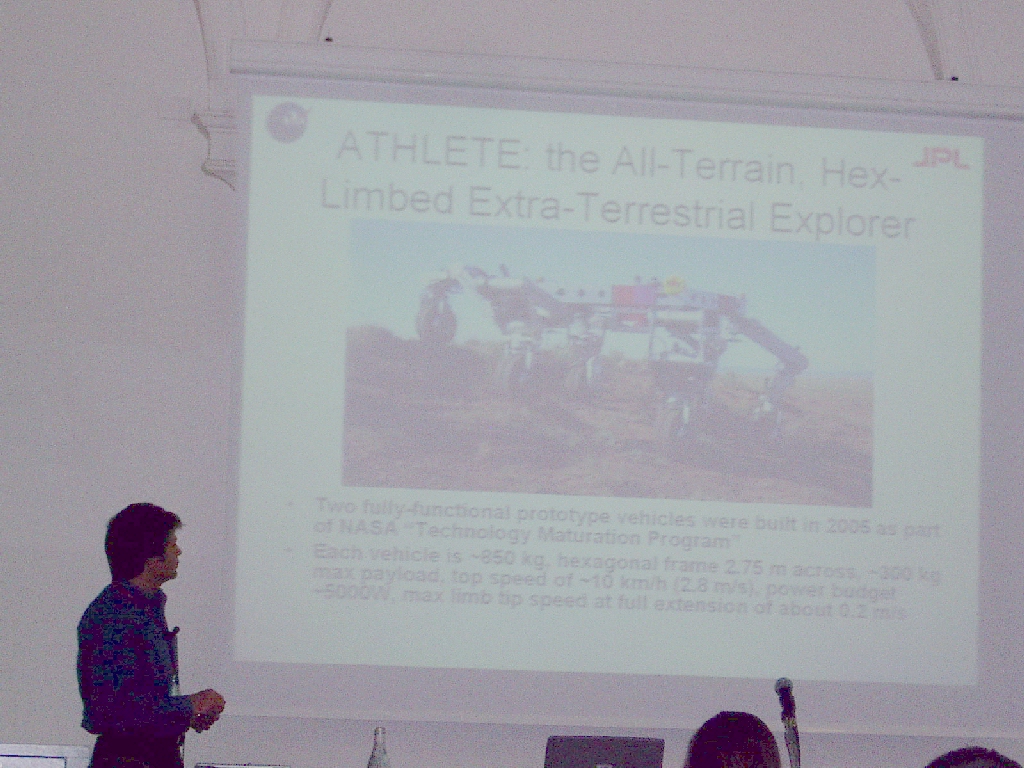
Richard Volpe presented Brian Wilcox's slides on ATHLETE, the Lunar mobility robotic system.
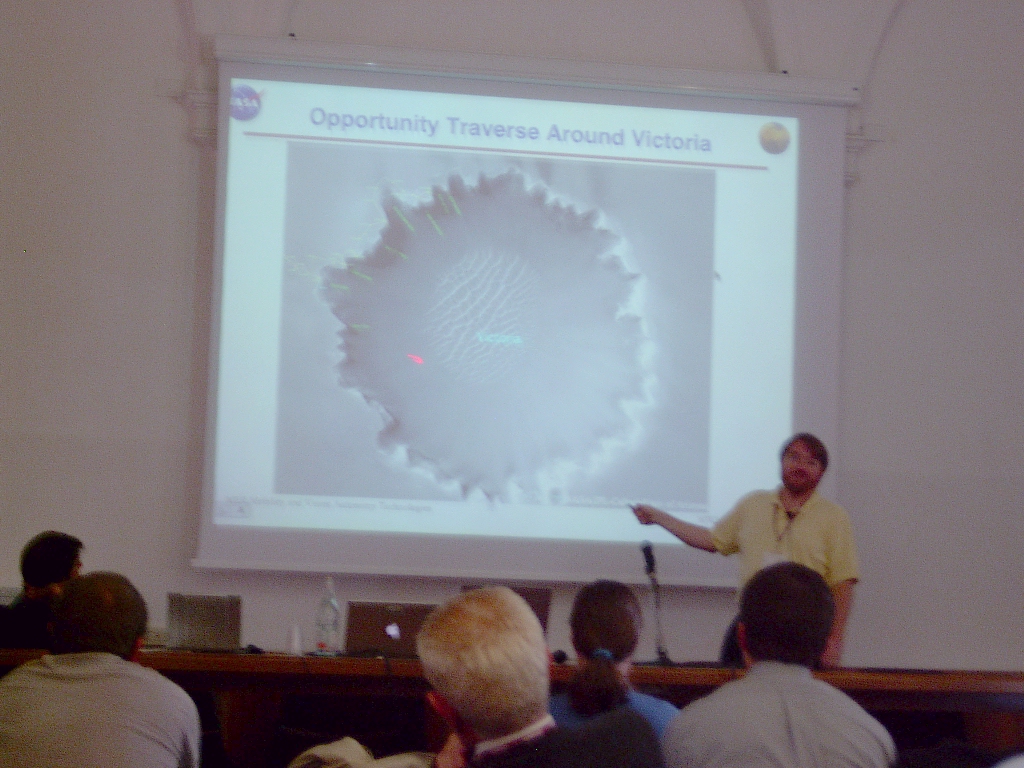
Mark Maimone presented an overview of MER autonomy and vision capability.
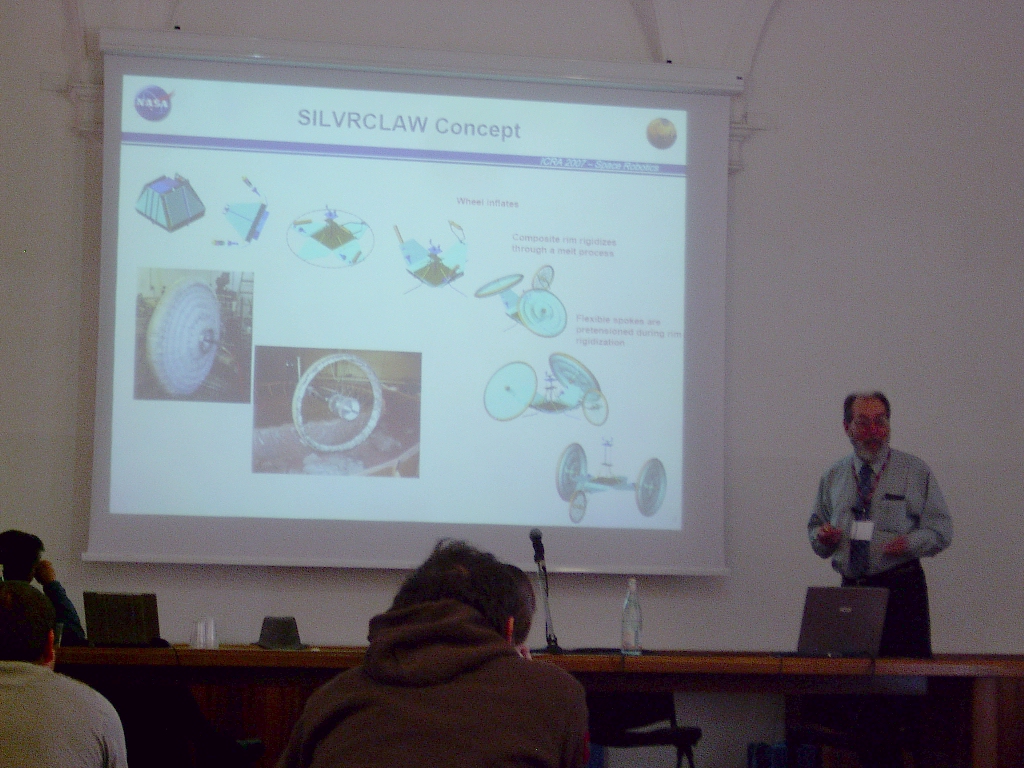
Rick Wagner presented Dimi Apostopolous's slides on SILVRCLAW.
Rick Wagner presented the lessons learned on the AWIMR (automated walking inspection and maintenance robot) project at Northrop Grumman (Hobson Lane, co-author). Slides. Paper.
If you have a photograph of a presenter not shown here, send it to Rick Wagner for inclusion.