
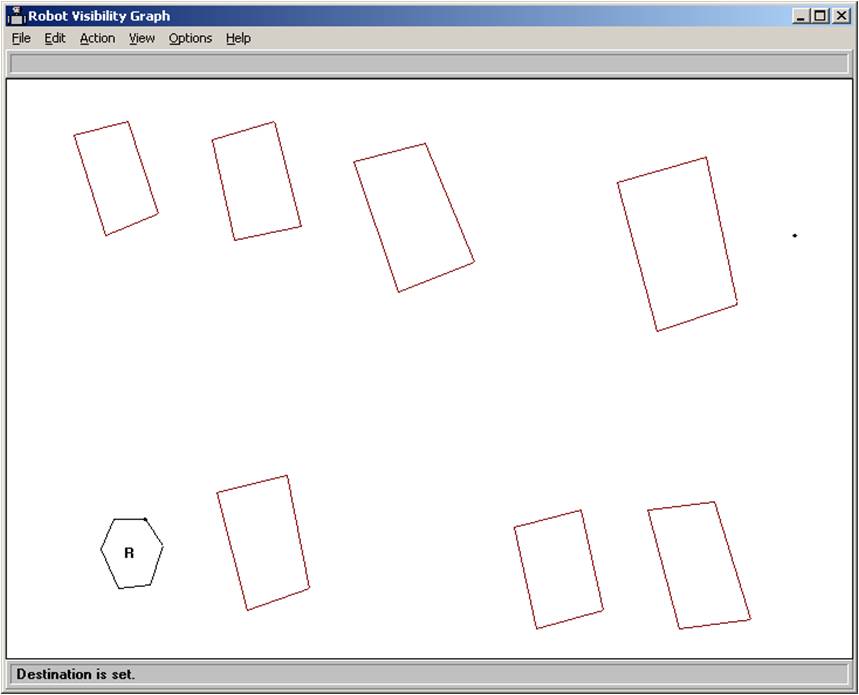
Visibility graph demonstration program. The robot is represented by the hexagon in the lower left
corner. The goal point is in the upper right corner. The red rectangular obstacles represent cars
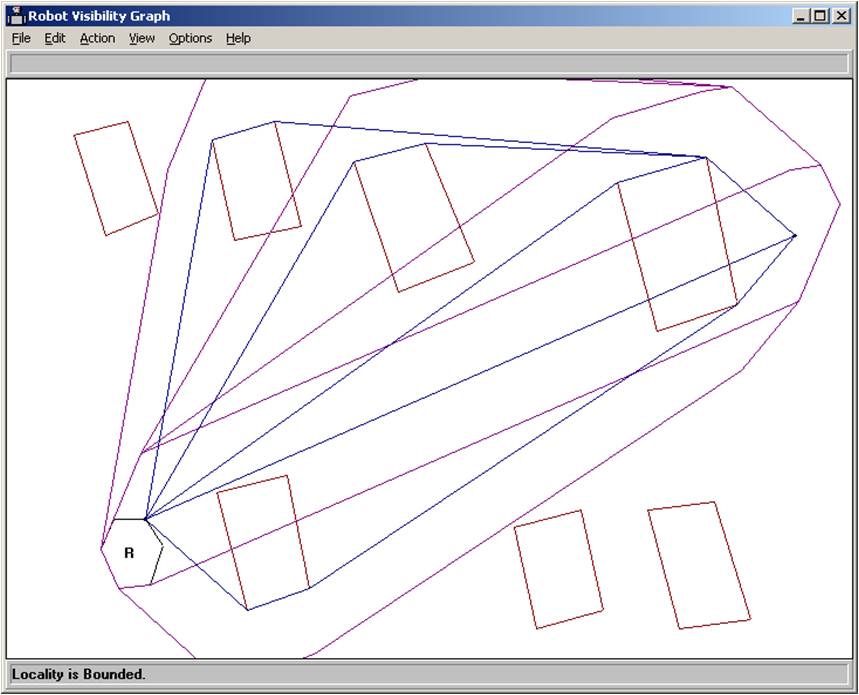
The locality is bounded by drawing a line from the robot to the goal and then “growing” this
line by the robot (Minkowski sum). If the grown line contacts any obstacles, those obstacles are
included in the locality and the process repeats until no new obstacles are included in the locality.
Here, four obstacles are included in the locality.
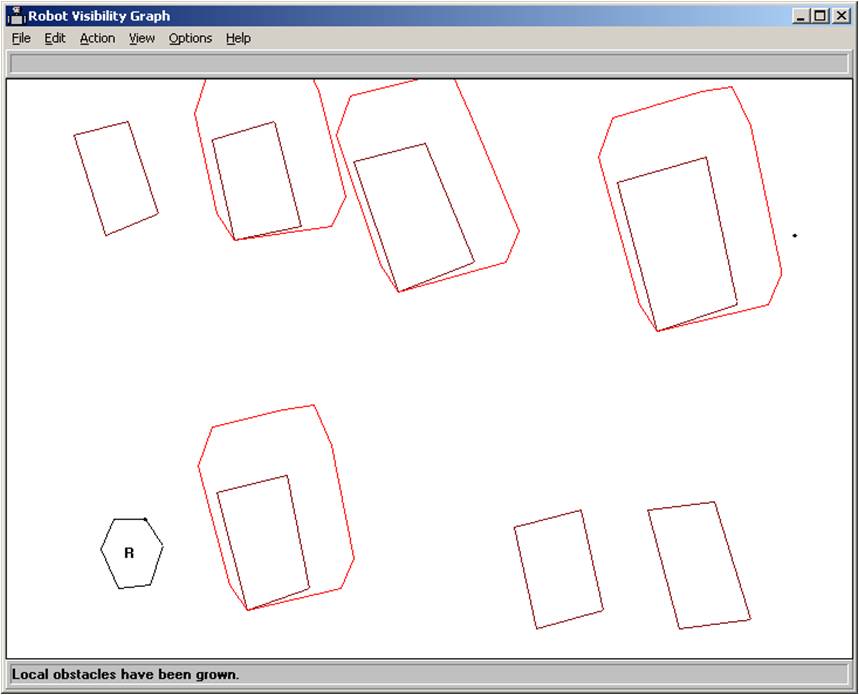
Next, the local obstacles are “grown” by the robot (take the Minkowski sum).
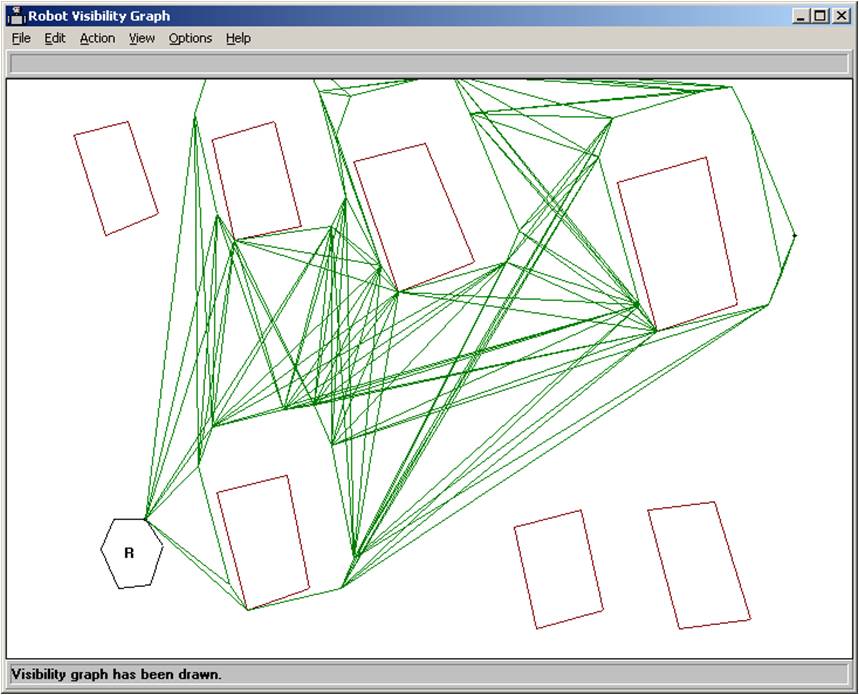
Then we draw the visibility graph of the robot, grown local obstacles, and the goal point.
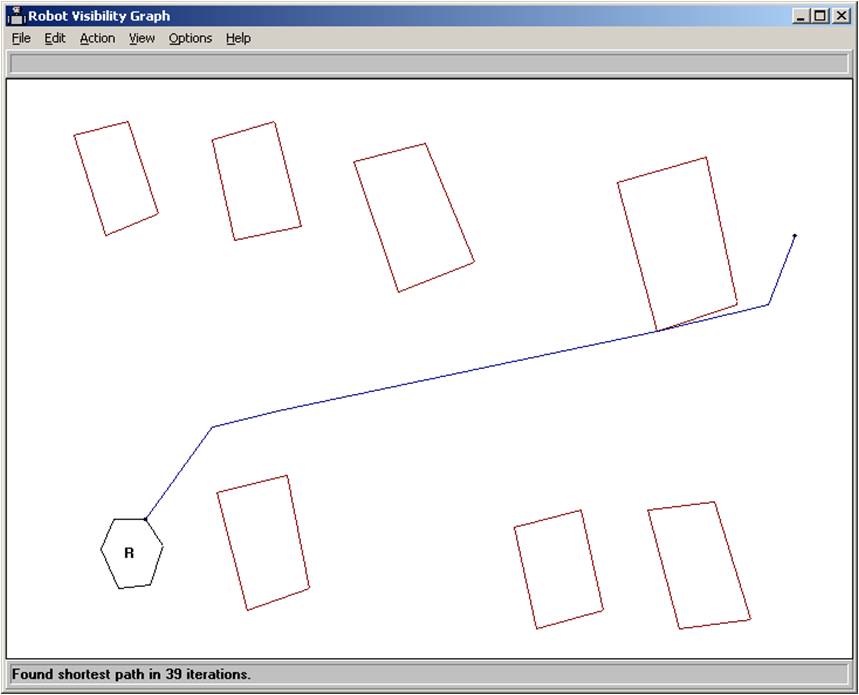
The shortest path in the visibility graph is then found using Djikstra’s algorithm.
 USC home
USC home Email Richard dot J dot Wagner at gmail dot com
Email Richard dot J dot Wagner at gmail dot com