Mojo
Mojo
is a robotic art work by
Christian Moeller.
It worked somewhat as intended when it was installed in 2007, but now it doesn't move at all.
I was asked to look into it and see what can be done.
Mojo Revitalization Team
The current team consists of:
- Kate Cizek (katec at grandvision dot org)
- Kevin Ryan (aspforyou at gmail dot com)
- Liz Schindler Johnson (lizschin1 at aol dot com]
- Rick Wagner (Rick dot Wagner at NGC dot com)
Join the team! If you would like to help us get Mojo working again, send email to me, Rick
Wagner, at Rick dot Wagner at NGC dot com.

Mojo appears to be a six DOF industrial arm holding a stylized dish and spotlight. Photo by Kate Cizek.

It's rather nice looking. Photo by Kate Cizek.

While the motors and control box (far side) are somewhat exposed, they seem to be fairly
well protected from the generally benign San Pedro weather. Photo by Kate Cizek.
Progress Tracking
July 13, 2010
A new quotation from Kuka on the repair in the amount of $22k has been received.
June 27, 2010: Sunday Meeting at Mojo
Lauren Davis, Brent Kuhn, Brandon Patterson, Kevin Ryan, Andrea Wagner, and I met Sunday, June 27, 2010
at the Mojo installation on 6th Street, San Pedro. We went into the basement and into the cage where
the Mojo control equipment is housed. Brent Kuhn, who worked on the original intallation, provided
considerable insight into potential problems. As we observed earlier, Mojo will not start due to
an internal error that indicates a control board or motor problem. Brent was able to answer a number
of my technical questions (see below).

Mojo from across the intersection at 10:00 AM on Sunday, June 27, 2010. Photo by Andrea Wagner.

We went up on the roof to get a closer look at the robot. Andrea leans over the edge to get photos.
Photo by Kevin Ryan.

Mojo, from the roof.

There are no handrails, so be careful!

Closeup of the control box at the base of the Kuka robot.

Brent, I, Brandon, and Kevin discuss things.

Kevin on the roof.

At the base of Mojo's column, we get a look inside.
May 28, 2010: Friday Excursion to Inspect Mojo
On Friday, May 28, Kevin Ryan and Rick Wagner inspected Mojo. We entered the parking garage using the
elevator from the lobby and opened the locked cage that contains Mojo's robot controller and the
vision system computer. We observed that the vision system computer was turned off. We powered it up
and it seemed to be operating properly: it was sending data to the Moho control computer.
We then tried the Mojo startup procedure from the
operating manual
provided to us by Cynthia Foronda. The startup procedure in the manual is unusably ambiguous, but we
tried several variants. First, there are two E-stop buttons. One, on the main controller frame, is
illustrated in a photo in the manual, and the other one, marked "E-stop" is on the controller pendant.
We tried the startup procedure with both of them, in turn. There appears to be no power-down procedure.
The startup procedures says to "turn on" Mojo. There is a big interlocking power lever switch on the
main cabinet. We tried that one. There are also some "one" and "zero" (conventions for on and off for
electrical equipment) buttons on the controller pendant. We thied those too.
We left the vision system computer running. Other than that, there is no change in Mojo status,
execpt that there is an "abort" message in the controller status line, which occurred when we
pressed the E-stop button on the main cabinet.
The investigation will continue. New questions have arisen:
- Who powered down the vision system computer, when, and why?
- How can we find out the actual power down and power up sequence for the robot system?
- Why does Kuka think that replacing a motor and cable will get it running again? See the $13k quotation
referenced below.
- Technical curiosity question: at night, during the "animation" portion of Mojo's routine (when it's
working as designed), why does the spotlight not cause the vision system to falsely report motion to
activate the "tracking" portion of Mojo's routine? Seems to me it should do that unless some very
sophisticated programming has been done (to know where it is pointing and disregard those pixels in the
vision system images). The spotlight is supposed to come on an hour after sunset.
Has it been doing that? If not, is it burned out? Is it only supposed to come on when the robot is
tracking motion from the vision system? If so, why does the turning on of the spotlight not confuse
the motion system? One would think that the bright spot would dominate perceived motion at night. It
should tend to try to track itself, leading to rapid convergence on itself, that is, the spot should
not ever move.
May 25, 2010: Kuka Repair Quotation
Kate Cizek of the
Grand Vision Foundation
provided a
quotation (PDF)
from the robot manufacturer,
Kuka,
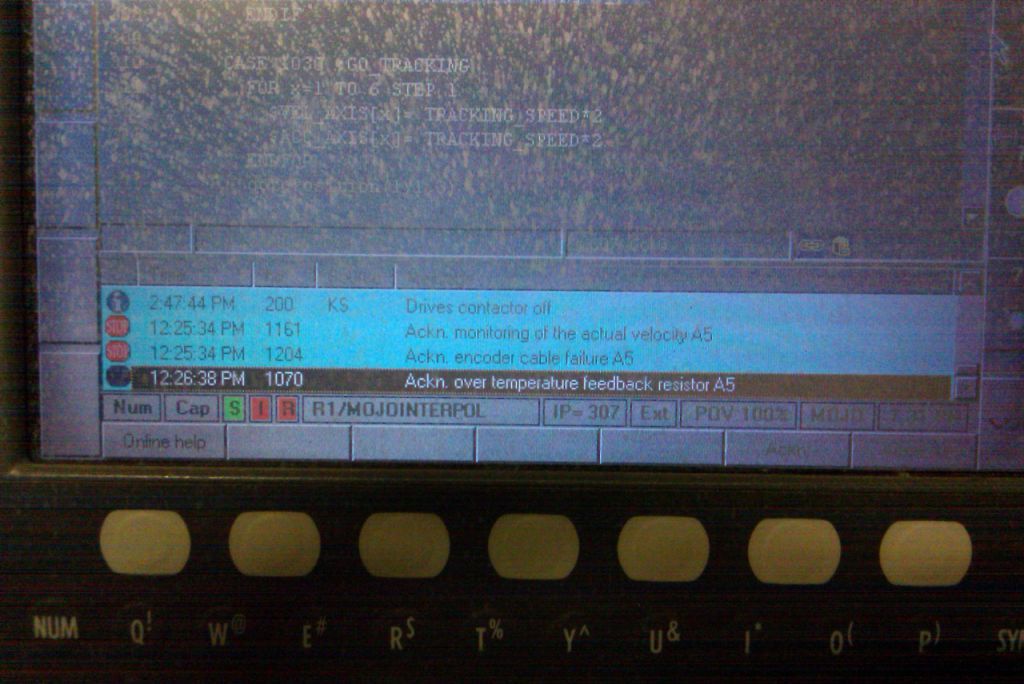
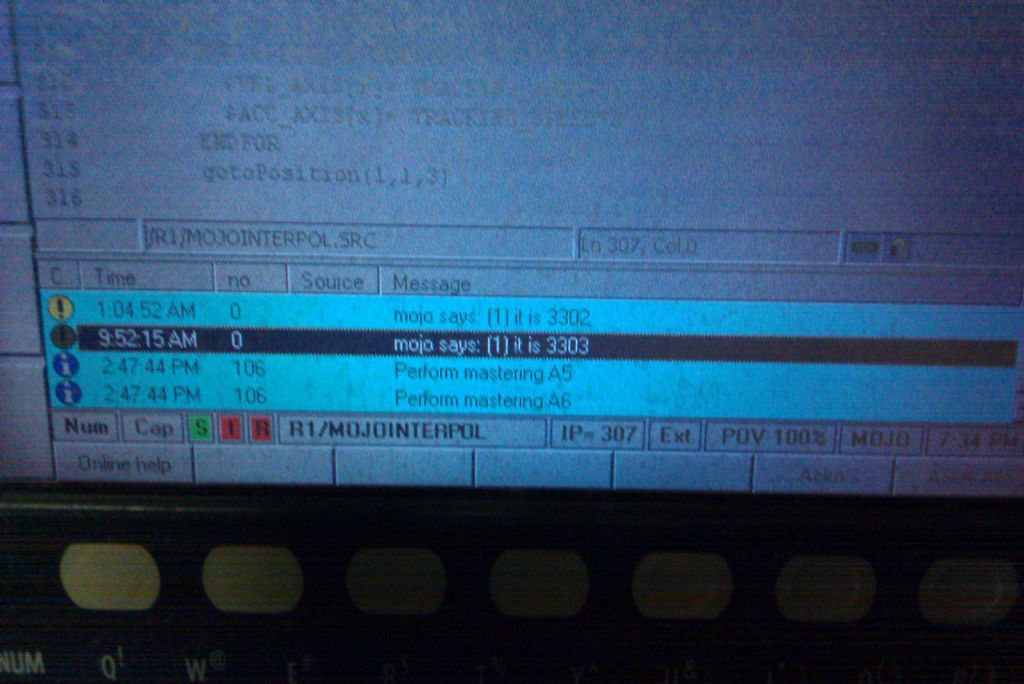
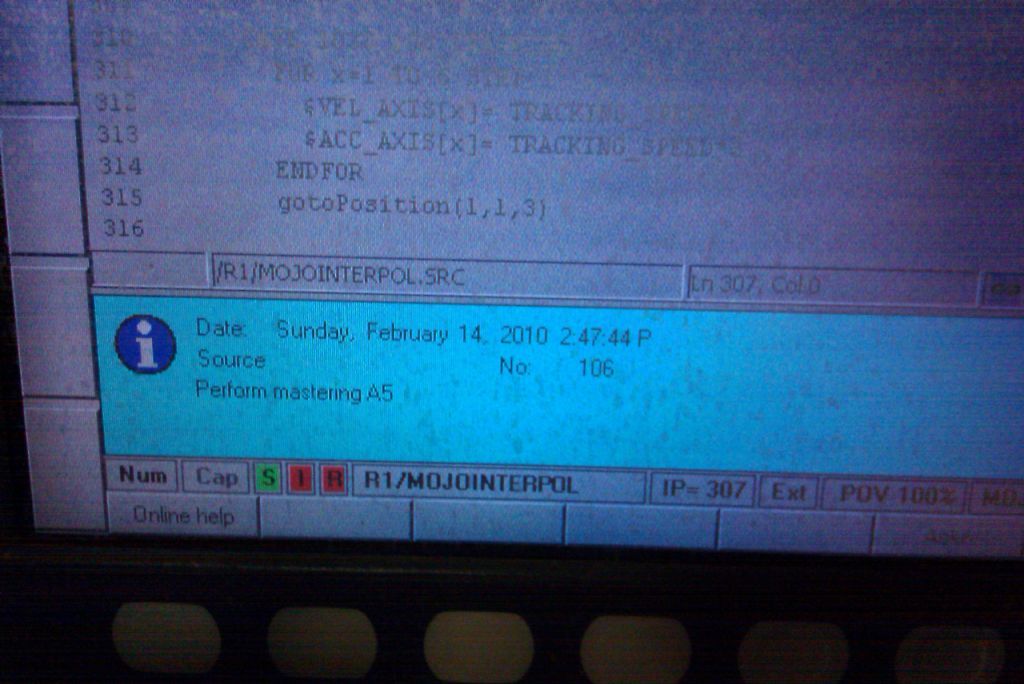
in the amount of $13,196.49. She also provided some screen shots of controller error messages:
From the screen shots it looks like the robot is programmed in Basic.
May 24, 2010: List of Questions
From the May 28 inspection above, and the operating manual, some questions have been answered (shown
in italics below).
Things we would like to find out:
- What part of the area are the two cameras viewing (the “workspace” of the robot)? From observation
of the two cameras that appear to be pointing straight down, the vision space of the cameras seems to be
two overlapping rectangles.
- Where is the control computer and how is it rebooted and the control program loaded? The control
system is located in the parking garage just under the ground floor, in the southwest corner, near the
Mojo installation. The startup procedure is unusably ambiguous. That is, the guy who wrote it can
probably follow it, but it's extremely vague to someone not intimately familiar with the system.
- Are there any operating instructions for users? Who is the operator who monitors it? A "manual" of
sorts has been provided, but it's not sufficient for those unfamiliar with the system. There appears to be
nobody monitoring the system, but someone turned off the vision computer power switch.
- Are there any diagnostic routines? There do not appear to be.
- Are the two cameras the only (non-joint) sensors? Yes. Day/night is by look-up table of times by
month of the year.
- Is the pointing of the light the only intended behavior? There is also an "animation" routine to
be performed when there is no detected motion via the vision system.
- When is the light supposed to turn on and off? The light is turned on one hour after sunset and
the system is put to rest at 3:00 AM.
- Does it sense day and night, or does it use system time? If so, is the system time set manually?
It uses system time, which is set manually when the system is set up. I assume there is an internal
battery that keeps the time when the system is turned off.
- Exactly what is the control algorithm intended to do? That is, specifically, how do we know when
it’s working correctly?
It would be nice to meet the operator/user and find out when it started to fail and what the
symptoms were.
index.html, this hand crafted HTML file was created May 21, 2010.
Last updated June 28, 2010, by
Rick Wagner.
Copyright © 2010 by Rick Wagner, all rights reserved.
{kind=link}
{kind=link}
{kind=link}